 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Damage Detection
Road damage detection is the process of identifying and categorizing different types of road damage using deep learning techniques.
Papers and Code
Reliable Deep Learning for Small-Scale Classifications: Experiments on Real-World Image Datasets from Bangladesh
Jan 17, 2026Convolutional neural networks (CNNs) have achieved state-of-the-art performance in image recognition tasks but often involve complex architectures that may overfit on small datasets. In this study, we evaluate a compact CNN across five publicly available, real-world image datasets from Bangladesh, including urban encroachment, vehicle detection, road damage, and agricultural crops. The network demonstrates high classification accuracy, efficient convergence, and low computational overhead. Quantitative metrics and saliency analyses indicate that the model effectively captures discriminative features and generalizes robustly across diverse scenarios, highlighting the suitability of streamlined CNN architectures for small-class image classification tasks.
Comparative Analysis of Custom CNN Architectures versus Pre-trained Models and Transfer Learning: A Study on Five Bangladesh Datasets
Jan 07, 2026This study presents a comprehensive comparative analysis of custom-built Convolutional Neural Networks (CNNs) against popular pre-trained architectures (ResNet-18 and VGG-16) using both feature extraction and transfer learning approaches. We evaluated these models across five diverse image classification datasets from Bangladesh: Footpath Vision, Auto Rickshaw Detection, Mango Image Classification, Paddy Variety Recognition, and Road Damage Detection. Our experimental results demonstrate that transfer learning with fine-tuning consistently outperforms both custom CNNs built from scratch and feature extraction methods, achieving accuracy improvements ranging from 3% to 76% across different datasets. Notably, ResNet-18 with fine-tuning achieved perfect 100% accuracy on the Road Damage BD dataset. While custom CNNs offer advantages in model size (3.4M parameters vs. 11-134M for pre-trained models) and training efficiency on simpler tasks, pre-trained models with transfer learning provide superior performance, particularly on complex classification tasks with limited training data. This research provides practical insights for practitioners in selecting appropriate deep learning approaches based on dataset characteristics, computational resources, and performance requirements.
Evaluation of Convolutional Neural Network For Image Classification with Agricultural and Urban Datasets
Jan 04, 2026This paper presents the development and evaluation of a custom Convolutional Neural Network (CustomCNN) created to study how architectural design choices affect multi-domain image classification tasks. The network uses residual connections, Squeeze-and-Excitation attention mechanisms, progressive channel scaling, and Kaiming initialization to improve its ability to represent data and speed up training. The model is trained and tested on five publicly available datasets: unauthorized vehicle detection, footpath encroachment detection, polygon-annotated road damage and manhole detection, MangoImageBD and PaddyVarietyBD. A comparison with popular CNN architectures shows that the CustomCNN delivers competitive performance while remaining efficient in computation. The results underscore the importance of thoughtful architectural design for real-world Smart City and agricultural imaging applications.
A Benchmark Dataset for Spatially Aligned Road Damage Assessment in Small Uncrewed Aerial Systems Disaster Imagery
Dec 13, 2025This paper presents the largest known benchmark dataset for road damage assessment and road alignment, and provides 18 baseline models trained on the CRASAR-U-DRIODs dataset's post-disaster small uncrewed aerial systems (sUAS) imagery from 10 federally declared disasters, addressing three challenges within prior post-disaster road damage assessment datasets. While prior disaster road damage assessment datasets exist, there is no current state of practice, as prior public datasets have either been small-scale or reliant on low-resolution imagery insufficient for detecting phenomena of interest to emergency managers. Further, while machine learning (ML) systems have been developed for this task previously, none are known to have been operationally validated. These limitations are overcome in this work through the labeling of 657.25km of roads according to a 10-class labeling schema, followed by training and deploying ML models during the operational response to Hurricanes Debby and Helene in 2024. Motivated by observed road line misalignment in practice, 9,184 road line adjustments were provided for spatial alignment of a priori road lines, as it was found that when the 18 baseline models are deployed against real-world misaligned road lines, model performance degraded on average by 5.596\% Macro IoU. If spatial alignment is not considered, approximately 8\% (11km) of adverse conditions on road lines will be labeled incorrectly, with approximately 9\% (59km) of road lines misaligned off the actual road. These dynamics are gaps that should be addressed by the ML, CV, and robotics communities to enable more effective and informed decision-making during disasters.
Self-Supervised Visual Prompting for Cross-Domain Road Damage Detection
Nov 16, 2025
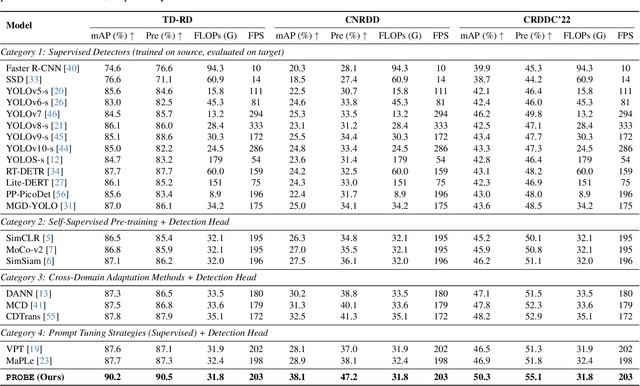
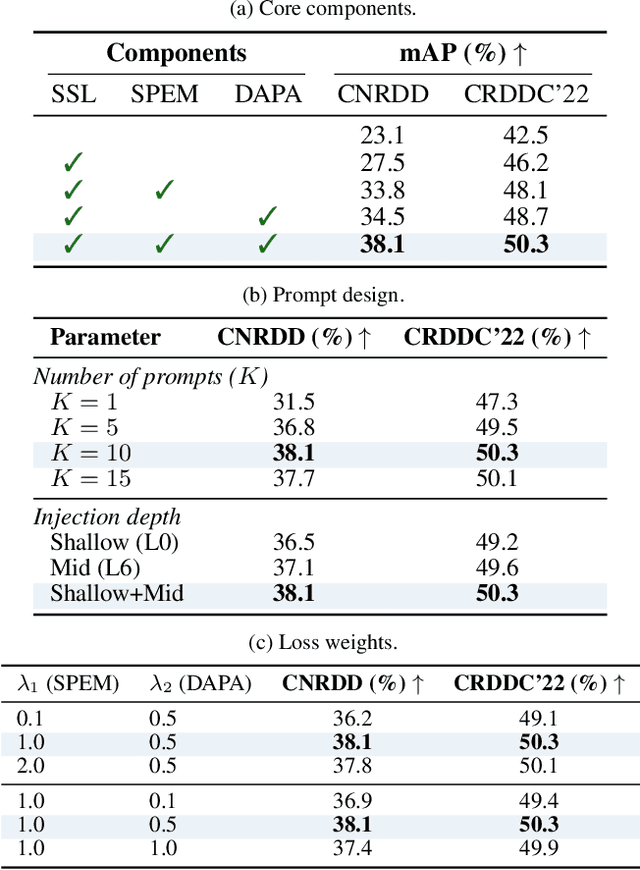

The deployment of automated pavement defect detection is often hindered by poor cross-domain generalization. Supervised detectors achieve strong in-domain accuracy but require costly re-annotation for new environments, while standard self-supervised methods capture generic features and remain vulnerable to domain shift. We propose \ours, a self-supervised framework that \emph{visually probes} target domains without labels. \ours introduces a Self-supervised Prompt Enhancement Module (SPEM), which derives defect-aware prompts from unlabeled target data to guide a frozen ViT backbone, and a Domain-Aware Prompt Alignment (DAPA) objective, which aligns prompt-conditioned source and target representations. Experiments on four challenging benchmarks show that \ours consistently outperforms strong supervised, self-supervised, and adaptation baselines, achieving robust zero-shot transfer, improved resilience to domain variations, and high data efficiency in few-shot adaptation. These results highlight self-supervised prompting as a practical direction for building scalable and adaptive visual inspection systems. Source code is publicly available: https://github.com/xixiaouab/PROBE/tree/main
Joint Training of Image Generator and Detector for Road Defect Detection
Sep 03, 2025

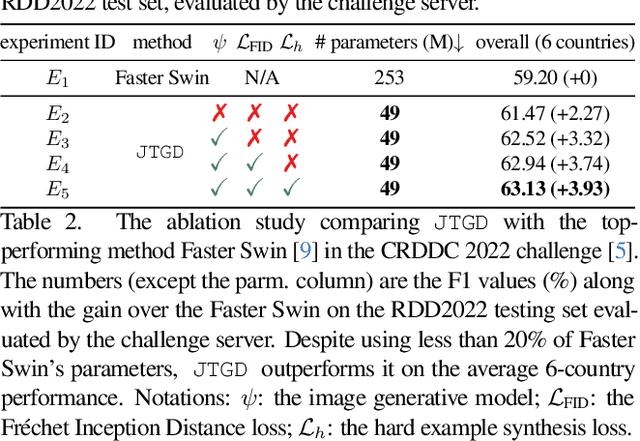
Road defect detection is important for road authorities to reduce the vehicle damage caused by road defects. Considering the practical scenarios where the defect detectors are typically deployed on edge devices with limited memory and computational resource, we aim at performing road defect detection without using ensemble-based methods or test-time augmentation (TTA). To this end, we propose to Jointly Train the image Generator and Detector for road defect detection (dubbed as JTGD). We design the dual discriminators for the generative model to enforce both the synthesized defect patches and overall images to look plausible. The synthesized image quality is improved by our proposed CLIP-based Fr\'echet Inception Distance loss. The generative model in JTGD is trained jointly with the detector to encourage the generative model to synthesize harder examples for the detector. Since harder synthesized images of better quality caused by the aforesaid design are used in the data augmentation, JTGD outperforms the state-of-the-art method in the RDD2022 road defect detection benchmark across various countries under the condition of no ensemble and TTA. JTGD only uses less than 20% of the number of parameters compared with the competing baseline, which makes it more suitable for deployment on edge devices in practice.
AI and Remote Sensing for Resilient and Sustainable Built Environments: A Review of Current Methods, Open Data and Future Directions
Jul 02, 2025Critical infrastructure, such as transport networks, underpins economic growth by enabling mobility and trade. However, ageing assets, climate change impacts (e.g., extreme weather, rising sea levels), and hybrid threats ranging from natural disasters to cyber attacks and conflicts pose growing risks to their resilience and functionality. This review paper explores how emerging digital technologies, specifically Artificial Intelligence (AI), can enhance damage assessment and monitoring of transport infrastructure. A systematic literature review examines existing AI models and datasets for assessing damage in roads, bridges, and other critical infrastructure impacted by natural disasters. Special focus is given to the unique challenges and opportunities associated with bridge damage detection due to their structural complexity and critical role in connectivity. The integration of SAR (Synthetic Aperture Radar) data with AI models is also discussed, with the review revealing a critical research gap: a scarcity of studies applying AI models to SAR data for comprehensive bridge damage assessment. Therefore, this review aims to identify the research gaps and provide foundations for AI-driven solutions for assessing and monitoring critical transport infrastructures.
Intelligent Road Anomaly Detection with Real-time Notification System for Enhanced Road Safety
May 13, 2025This study aims to improve transportation safety, especially traffic safety. Road damage anomalies such as potholes and cracks have emerged as a significant and recurring cause for accidents. To tackle this problem and improve road safety, a comprehensive system has been developed to detect potholes, cracks (e.g. alligator, transverse, longitudinal), classify their sizes, and transmit this data to the cloud for appropriate action by authorities. The system also broadcasts warning signals to nearby vehicles warning them if a severe anomaly is detected on the road. Moreover, the system can count road anomalies in real-time. It is emulated through the utilization of Raspberry Pi, a camera module, deep learning model, laptop, and cloud service. Deploying this innovative solution aims to proactively enhance road safety by notifying relevant authorities and drivers about the presence of potholes and cracks to take actions, thereby mitigating potential accidents arising from this prevalent road hazard leading to safer road conditions for the whole community.
TD-RD: A Top-Down Benchmark with Real-Time Framework for Road Damage Detection
Jan 24, 2025



Object detection has witnessed remarkable advancements over the past decade, largely driven by breakthroughs in deep learning and the proliferation of large scale datasets. However, the domain of road damage detection remains relatively under explored, despite its critical significance for applications such as infrastructure maintenance and road safety. This paper addresses this gap by introducing a novel top down benchmark that offers a complementary perspective to existing datasets, specifically tailored for road damage detection. Our proposed Top Down Road Damage Detection Dataset (TDRD) includes three primary categories of road damage cracks, potholes, and patches captured from a top down viewpoint. The dataset consists of 7,088 high resolution images, encompassing 12,882 annotated instances of road damage. Additionally, we present a novel real time object detection framework, TDYOLOV10, designed to handle the unique challenges posed by the TDRD dataset. Comparative studies with state of the art models demonstrate competitive baseline results. By releasing TDRD, we aim to accelerate research in this crucial area. A sample of the dataset will be made publicly available upon the paper's acceptance.
M2S-RoAD: Multi-Modal Semantic Segmentation for Road Damage Using Camera and LiDAR Data
Apr 14, 2025Road damage can create safety and comfort challenges for both human drivers and autonomous vehicles (AVs). This damage is particularly prevalent in rural areas due to less frequent surveying and maintenance of roads. Automated detection of pavement deterioration can be used as an input to AVs and driver assistance systems to improve road safety. Current research in this field has predominantly focused on urban environments driven largely by public datasets, while rural areas have received significantly less attention. This paper introduces M2S-RoAD, a dataset for the semantic segmentation of different classes of road damage. M2S-RoAD was collected in various towns across New South Wales, Australia, and labelled for semantic segmentation to identify nine distinct types of road damage. This dataset will be released upon the acceptance of the paper.